
Control PID Agar Robot Line Follower Berjalan Mulus

Sering kali kita kebingungan saat robot kita tidak bisa melaju dengan mulus......
Ketika belok malah keterusan......gak balik-balik.....
di sini saya akan mengulas sedikit tentang PID agar robot dapat berjalan dengan mulus
1. Kontrol Proportional
Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s) • e maka u = Kp • e dengan Kp adalah Konstanta Proporsional.
Kp berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler.
Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini.
Walaupun demikian dalam aplikasi-aplikasi dasar yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien khususnya rise time dan setting time.

Pada line follower KP digunakan untuk merespon terjadinya eror untuk kembali pada kondisi normal.
Semakin besar KP semakin baik akan tetapi jika terlalu besar robot akan getar karena setiap sedikit saja terjadi eror maka robot akan dengan cepat memeperbaikinya.
Karena terjadi berulang-ulang maka robot seakan-akan getar.
2. Kontrol Integral
Kontrol integral merupakan mode kontrol dimana keluaran pengontrol berbanding lurus dengan integral error terhadap waktu, jadi: Keluaran pengontrol x integral error terhadap waktu.
Dimana KI adalah konstanta proposionalitas dan apabila keluaran pengontrol dinyatakann sebagai persentase serta error juga dinyatakan dalam persentase, maka satuan dari konstanta proposionalitas ini adalah s-1 (1/detik)
Keluaran pengontrol I= KI x integral error terhadap waktu
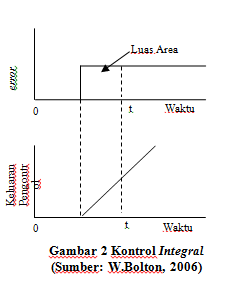
untuk mengilustrasikan apa yang dimaksud dengan integral error terhadap waktu, tinjaulah sebuah situasi dimana error berubah terhadap waktu dengan cara seperti tampak pada Gambar 2 Nilai dari integral pada waktu t adalah sama dengan luas di bawah kurva antara t=0 dan t.
Jadi diperoleh:
Keluaran pengontrol luas area di bawah kurva error antara t=0 dan t.
Jadi, dengan bertambahnya t, maka luas area di bawah kurva akan semakin besar dan keluaran pengontrol juga semakin besar.
Karena dalam contoh ini luas area berbanding lurus dengan t dan bertambah dengan laju yang konstan.
Perhatikan bahwa pandangan ini menawarkan alternative lain untuk menggambarkan kontrol integral sebagai berikut:
Laju perubahan keluaran pengontrol error Suatu error dengan nilai konstan akan memberikan perubahan keluaran pengontrol dengan laju konstan.
Sesuai dengan rumus KI bahwa keluaran KI adalah KI X integral eror terhadap waktu, maka KI pada line follower sebenarnya tidak berpengaruh karena KI akan mengintegralkan setiap eror terhadap waktu, dimana robot tidak pernah pada posisi lebih dari eror tetapi yang diperlukan oleh robot adalah mengurangi atau menurunkan eror seminimal mungkin.
3. Kontrol Derivatif
Dengan kontrol derivative perubahan pengeluaran pengontrol dari titik pengaturan akan berbanding lurus dengan laju perubahan terhadap waktu dari sinyal error. Jadi, keluaran pengontrol x laju perubahan error dirumuskan sebagai berikut.
Keluaran pengontrol D = Kp x laju perubahan eror

Keluaran pengontrol biasanya dinyatakan dalam bentuk persentase terhadap jangkauan penuh keluaran, dan error juga dinyatakan sebagai persentase terhadap jangkauan penuh.
Kp adalah konstanta proposionalitas dan lebih dikenal sebagai derivatif turunan terhadap waktu dengan satuan waktu.
Gambar 3 mengilustrasikan jenis respons yang akan muncul apabila terdapat sinyal error yang terus meningkat.
Karena laju perubahan error terhadap waktu adalah konstan, maka pengontrol derivatif akan memberikan sinyal keluaran pengontrol yang konstan pada elemen koreksi.
Dengan kontrol derivatif, segera setelah sinyal-sinyal error mulai berubah, maka akan muncul keluaran pengontrol yang cukup besar mengingat keluarannya berbanding lurus dengan laju perubahan sinyal error, dan bukan nilai sinyal errornya.
Jadi dengan bentuk kontrol ini akan dapat diperoleh respons korektif yang cepat terhadap sinyal-sinyal error yang terjadi.
Pada line follower KD digunakan untuk kecepatan robot dalam merespon terjadinya eror untuk kembali pada kondisi normal.
Tidak ada komentar:
Posting Komentar